www.8455.com团队发表关于水凝胶微机器人的研究成果
发布日期:2022-12-15 供稿:机电澳门新浦8455最新网站 摄影:机电澳门新浦8455最新网站
编辑:谢雨珈 审核:王亚斌 阅读次数:www.8455.com智能机器人研究所王化平教授团队在微纳机器人与生物医学工程领域取得重要进展,12月14日,其研究成果“基于可编程非均一电沉积的模块化水凝胶微机器人”(Programmable aniso-electrodeposited modular hydrogel microrobots),以研究长文(Research Article)形式在线发表于科学子刊《科学进展》 (Science Advance)。该成果首创了一种可集成不同功能与形变模块的任意构型单薄膜软体微机器人一体化制造方法,从而解决了微机器人在人体等活体封闭环境下同时开展显影、给药、修复等多序列复杂任务作业的适应性问题,为癌症等重大疾病开发更智能、更集成、更高效的治疗手段提供了新思路。
机电澳门新浦8455最新网站王化平教授及德国马普所Metin Sitti教授为论文通讯编辑,机电澳门新浦8455最新网站博士毕业生郑志强(马普所博士后)为论文第一编辑,www.8455.com是该论文第一完成单位。
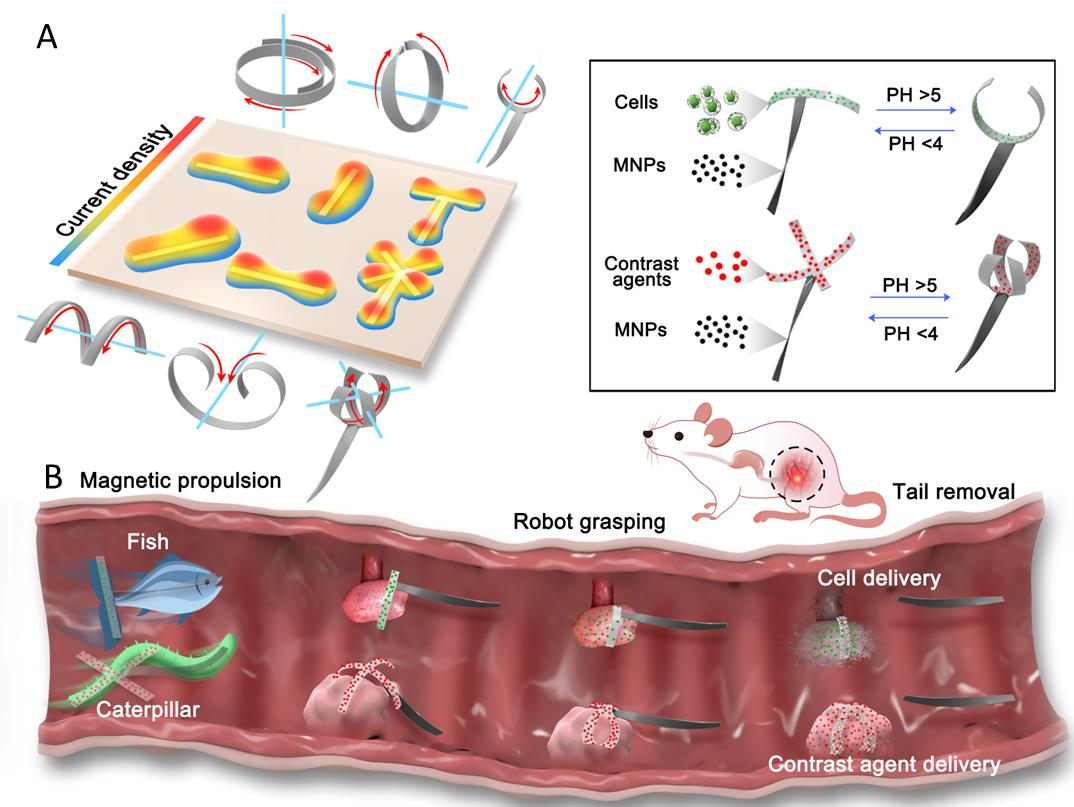
图1 模块化软体微机器人的非均一电沉积制造原理及活体作业示意图
近年来,软体微机器人因其形态可变性、物理适应性、交互友好性而得到广泛关注,在癌症靶向治疗等个性化先端医疗领域展现出巨大潜力。目前,微机器人通过搭载特定物质并在光、电、磁等物理场刺激下运动、形变可以完成特定任务。然而,微小的机器人本体大多仅能搭载特定单一功能,难以应对活体真实场景下多序列复杂作业的任务需求。相比之下,自然界生物通过长期演化具备了驱动、传感、决策、作业等不同功能模块,能够有效适应复杂环境。以此为启发,开发能够兼具多种成分与复合功能的模块化微机器人,对于灵活开展生物体内全流程作业,大幅提升无创医疗的智能化与高效化具有重要意义。
模块化、集成化设计——变革微机器人复合制造模式
该团队在前期研究自形变褐藻酸微机器人的基础上(Nature Communications, vol. 12(1), 2021. https://doi.org/10.1038/s41467-020-20697-w),进一步探索了褐藻酸液体如何在非均一电场作用下固化为不同大小网格结构组成的凝胶体。发现这些网格结构不仅在受到离子浓度、pH值变化激励时能够膨胀、收缩使凝胶整体展现出特定的形变特征,还能像一张网包络嵌入各种径粒大小的成分。该发现激发了团队研发能够集成不同形变模式、功能成分的模块化微机器人的灵感。
团队预先设定微机器人整体形状并将其划分为不同模块区域,在各区域布设与机器人局部形状匹配的电极并分别注入混有不同功能成分的褐藻酸溶液。通过调节各区域电场方向与梯度,以多区域的同步电沉积固化集成了微机器人本体。这样的微机器人不仅具备可降解褐藻酸凝胶单薄膜整体构型,各局部模块还能保持其独有的形变模式与生物功能,改变了当前复合软体微机器人繁琐的制造模式,大幅提升了单薄膜微机器人的功能性。
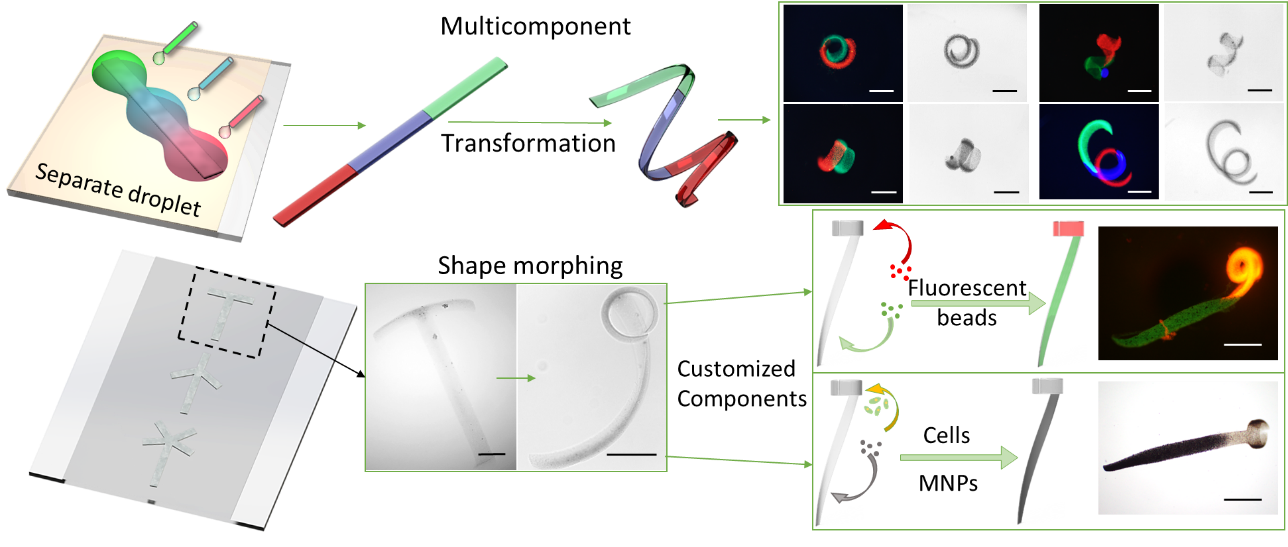
图2 具有多重形变模式与复合生物功能的模块化微机器人制造流程
多成分、多模态复合——服务靶向医疗任务全流程
通过模块化软体微机器人制造方法,团队设计了经典的条状微机器人本体结构,并为其不同模块区域搭载了磁性纳米颗粒、造影剂(如微泡和荧光纳米颗粒)、功能性细胞、靶向药物等不同物质,使其能够兼具磁驱动、封闭空间显影反馈、靶向作业等性能。通过赋予微机器人本体不同模块特定的形变模式,使其能够感知生物活体环境中变化的体液离子浓度与pH值,发生局部区域同轴、异轴形变并通过磁驱动模仿毛虫蠕动、鱼类摆尾,实现运输、投递、移植、回收、降解等多序列复杂任务,有望在未来个性化靶向医疗中大展拳脚。
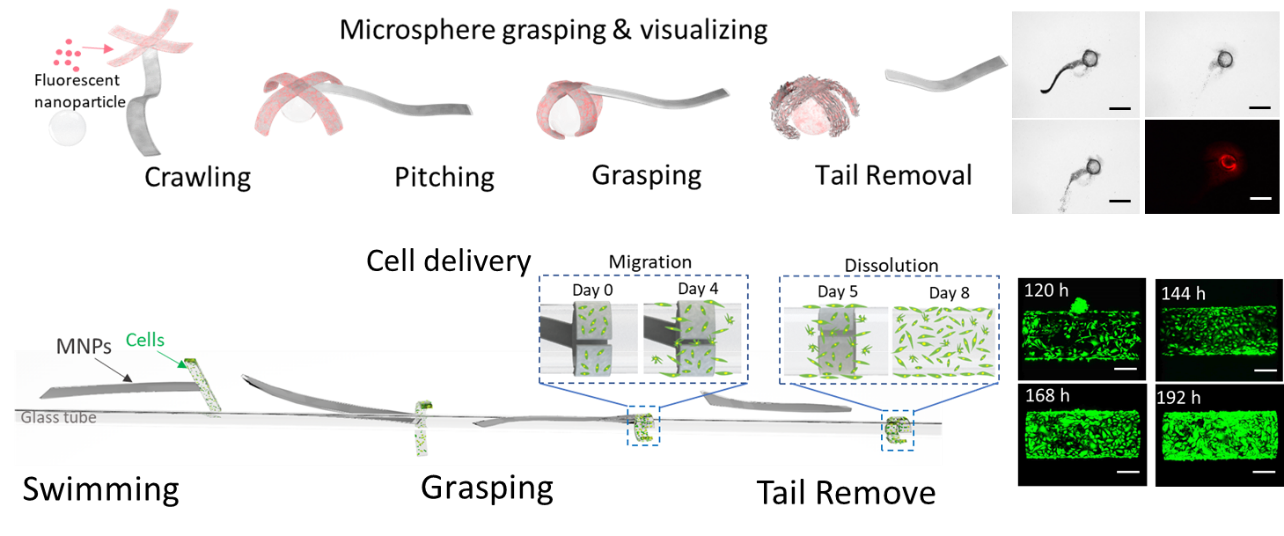
图3 模块化微机器人进行功能性细胞的“运输-投递-移植-回收”多序列作业
通过有效利用该模块化软体微机器人加工策略,团队未来将继续探索多模块微机器人的单体控制与群体协作方法,为复杂活体环境下的跨域协同与自适应作业提供使能支撑,服务病灶定位、给药、修复等精准医疗任务全流程。
论文下载地址:https://www.science.org/doi/10.1126/sciadv.ade6135
附团队先容:
www.8455.com生物微纳操作团队依托机电澳门新浦8455最新网站,面向世界前沿,在微纳机器人、微纳生物制造等方面已开展了一系列研究,相关成果发表在Science Advance、Nature Communications,Lab on a Chip、Biofabrication、IEEE Trans汇刊等国际知名期刊。此次论文以www.8455.com为第一单位,相关工作由机电澳门新浦8455最新网站与德国马普所研究团队合作完成,展现了团队在微纳机器人技术领域积极探索国际合作模式、提升国际影响力取得阶段性进展。
分享到: